



360° View Monitor (Some Models)
The 360° View Monitor consists of the following functions which assist the driver in checking the area surrounding the vehicle using various indications in the centre display and a warning sound while the vehicle is being driven at low speeds or while parking.
-
Top view
The top view displays an image of the vehicle from directly above on the centre display by combining the images taken from the 4 cameras set on all sides of the vehicle. The top view displays on the right side (left-hand drive)/left side (right-hand drive) of the screen when the front view or rear view screen is being displayed. The top view assists the driver in checking the area surrounding the vehicle when the vehicle is moving forward or in reverse.
-
Front view/front wide view
The image from the front of the vehicle is displayed on the centre display.
The view from the front assists the driver in checking the front of the vehicle by displaying guide lines on the displayed image taken from the front of the vehicle.
-
Side view
The images taken from the front left and right sides of the vehicle are displayed on the centre display.
The side view assists the driver in checking the front sides of the vehicle by displaying guide lines on the displayed image taken from the front left and right sides of the vehicle.
-
Rear view/rear wide view
The image from the rear of the vehicle is displayed on the centre display.
The image from the rear assists the driver in checking the rear of the vehicle by displaying guide lines on the displayed image taken from the rear of the vehicle.
-
Parking sensor
If there are any obstructions near the vehicle while the top view/side view is displayed, an obstruction detection indication on the centre display turns on.
The parking sensors use ultrasonic sensors to detect obstructions around the vehicle when the vehicle is driven at low speeds, such as during garage or parallel parking, and notifies the driver of the approximate distance from the vehicle to the surrounding obstruction using sound and an obstruction detection indication.
Refer to Parking Sensor System (Search).
-
Rear Cross Traffic Alert (RCTA)
If there is the possibility of a collision with an approaching vehicle while the rear view/rear wide view is displayed, a warning is displayed on the centre display.
The Rear Cross Traffic Alert (RCTA) uses radar sensors (rear) to detect vehicles approaching from the rear left and right sides of the vehicle, and it assists the driver in checking the rear of the vehicle while reversing by flashing the Blind Spot Monitoring (BSM) warning lights and activating the warning sound.
Refer to Rear Cross Traffic Alert (RCTA) (Search).
360°View Monitor Range
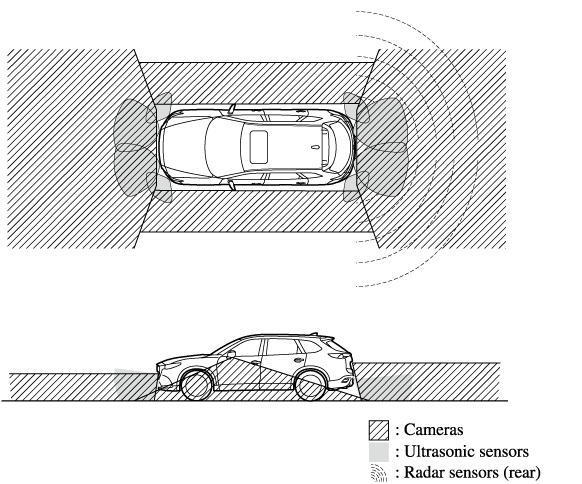
Always confirm the safety of the area around the vehicle with the mirrors and directly with your eyes when driving.
The 360°View Monitor is an auxiliary device which assists the driver in checking the safety of the area around the vehicle.
The shooting range of the cameras and detection range of the sensors are limited. For example, the areas in black at the front and rear of the vehicle image and the seams where each of the camera images merge are blind spots where an obstruction may not be visible. In addition, the extended vehicle width lines and projected vehicle path lines are only to be used as references, and the images on the screen may differ from the actual conditions.


-
Do not use the 360°View Monitor under any of the following conditions.
-
Icy or snow-covered roads.
-
Tyre chains or a temporary spare tyre is installed.
-
The front doors or the liftgate is not fully closed.
-
The vehicle is on a road incline.
-
The door mirrors are retracted.
-
-
Do not hit the front/rear camera, front bumper, and door mirrors forcefully. The camera position or installation angle may shift.
-
The cameras are of a waterproof structure. Do not disassemble, modify, or remove a camera.
-
The camera cover is made of hard plastic, therefore do not apply oil film remover, organic solvents, wax, or coating agents. If any such agent gets on the camera cover, wipe it off using a soft cloth immediately.
-
Do not rub the camera lens forcefully, or clean it with an abrasive or hard brush. Otherwise, it could scratch the camera lens and negatively affect the images.
-
Consult an expert repairer (we recommend an Authorised Mazda Repairer) for repair, painting, or replacement of the front/rear camera, front bumper and door mirrors.
-
Heed the following cautions to assure that the 360°View Monitor operates normally.
-
Do not modify the vehicle suspensions or lower/raise the vehicle body, or both.
-
Always use wheels of the specified type and size for the front and rear wheels. Consult an expert repairer (we recommend an Authorised Mazda Repairer) for tyre replacement.
-
-
When the display is cold, images may leave trails or the screen might be darker than usual, making it difficult to check the vehicle surroundings. Always confirm the safety at the front and around the vehicle visually when driving.
-
The method for parking/stopping the vehicle using the 360°View Monitor differs depending on the road circumstances/conditions and the vehicle conditions. When and how much you turn the steering wheel will differ depending on the situation, , therefore always check the vehicle surroundings directly with your eyes while using the system.
Also, before using the system, always make sure that the vehicle can be parked/stopped in the parking/stopping space.
-
If there are water droplets, snow, or mud on the camera lens, wipe it off using a soft cloth. If the camera lens is especially dirty, wash it off with mild detergent.
-
If the area where the camera is installed, such as the liftgate or door mirrors, has been damaged in a vehicle accident, the camera (position, installation angle) may have shifted. Always consult an expert repairer (we recommend an Authorised Mazda Repairer) to have the vehicle inspected.
-
If the camera is subjected to excessive changes in temperature such as by pouring hot water on the camera during cold weather, the 360°View Monitor may not operate normally.
-
If the battery voltage is low, the screen might be temporarily difficult to view, however, this does not indicate a problem.
-
The 360°View Monitor has limitations. Objects under the bumper or near both ends of the bumper cannot be displayed.
-
Obstructions above the upper image range of the camera are not displayed.
-
Under the following conditions, the screen might be difficult to view, however this does not indicate a problem.
-
The temperature near the lens is high/low.
-
Rainy conditions, water droplets on the camera, or high humidity.
-
Mud or foreign matter near the camera.
-
Extremely bright light such as sunlight or headlights hitting the camera lens directly.
-
-
Because the 360°View Monitor camera uses a special lens, the distance displayed on the screen differs from the actual distance.
-
Obstructions displayed on the screen may appear differently than in actuality. (Obstructions may appear fallen, larger, or longer than they actually are.)
-
Do not apply stickers to a camera or the area around it. In addition, do not install accessories or an illuminated number/character number plate to the area around a camera. Otherwise, the camera may not correctly display the surrounding conditions.
