Read this first
Read this first












Blind Spot Monitoring (BSM) (Some Models)
The BSM is designed to assist the driver in checking the area to the rear of the vehicle on both sides during lane changes by notifying the driver of the presence of vehicles approaching from the rear in an adjacent lane.
The BSM detects vehicles approaching from the rear while travelling in the forward direction at a speed of 10 km/h (6.3 mph) or faster and notifies the driver by turning on the BSM warning indicator light and displaying the vehicle detection screen (vehicles with active driving display).
If the direction indicator lever is operated to signal a turn in the direction in which the BSM warning indicator light is illuminated while the approaching vehicle is detected, the BSM notifies the driver of possible danger by turning on the BSM warning indicator light, and by activating the warning sound and the warning screen indicator display (vehicles with active driving display).
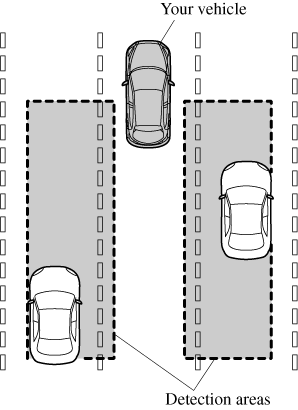
The detection area on this system covers the driving lanes on both sides of the vehicle and from the rear part of the front doors to about 50 m (164 ft) behind the vehicle.
Always check the surrounding area visually before making an actual lane change:
The system is only designed to assist you in checking for vehicles at your rear when making a lane change. Due to certain limitations with the operation of this system, the BSM warning indicator light, the warning sound and the warning screen indicator display may not activate or they might be delayed even though a vehicle is in an adjacent driving lane. Always make it your responsibility as a driver to check the rear.


-
The BSM will operate when all of the following conditions are met:
-
The ignition is switched ON.
-
The BSM OFF indicator light in the instrument cluster is turned off.
-
The vehicle speed is about 10 km/h (6.3 mph) or faster.
-
-
The BSM will not operate under the following circumstances.
-
The vehicle speed falls below about 10 km/h (6.3 mph) even though the BSM OFF switch indicator light is turned off.
-
The shift lever (manual transaxle)/selector lever (automatic transaxle) is shifted to reverse (R) and the vehicle is reversing.
-
The turning radius is small (making a sharp turn, turning at intersections).
-
-
In the following cases, the BSM OFF indicator light turns on and operation of the system is stopped. If the BSM OFF indicator light remains illuminated, have the vehicle inspected at an Authorised Mazda Repairer as soon as possible.
-
Some problem with the system including the BSM warning indicator lights is detected.
-
A large deviation in the installation position of a radar sensor (rear) on the vehicle has occurred.
-
There is a large accumulation of snow or ice on the rear bumper near a radar sensor (rear). Remove any snow, ice or mud on the rear bumper.
-
Driving on snow-covered roads for long periods.
-
The temperature near the radar sensors (rear) becomes extremely hot due to driving for long periods on slopes during the summer.
-
The battery voltage has decreased.
-
-
Under the following conditions, the radar sensors (rear) cannot detect target objects or it may be difficult to detect them.
-
A vehicle is in the detection area at the rear in an adjacent driving lane but it does not approach. The BSM determines the condition based on radar detection data.
-
A vehicle is travelling alongside your vehicle at nearly the same speed for an extended period of time.
-
Vehicles approaching in the opposite direction.
-
A vehicle in an adjacent driving lane is attempting to pass your vehicle.
-
A vehicle is in an adjacent lane on a road with extremely wide driving lanes. The detection area of the radar sensors (rear) is set at the road width of expressways.
-
-
In the following case, the flashing of the BSM warning indicator light, and the activation of the warning sound and the warning screen indicator display may not occur or they may be delayed.
-
A vehicle makes a lane change from a driving lane two lanes over to an adjacent lane.
-
Driving on steep slopes.
-
Crossing the summit of a hill or mountain pass.
-
When there is a difference in the height between your driving lane and the adjacent lane.
-
Directly after the BSM system becomes operable by changing the setting.
-
-
If the road width is extremely narrow, vehicles two lanes over may be detected. The detection area of the radar sensors (rear) is set according to the road width of expressways.
-
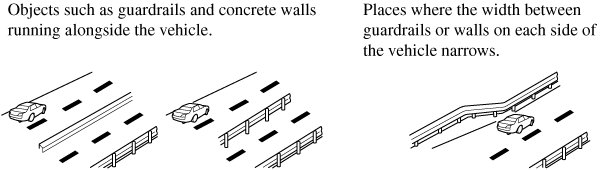
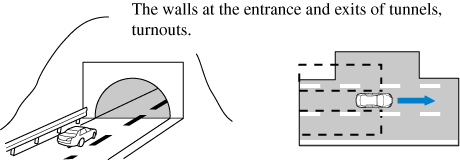
The BSM warning indicator light may turn on and the vehicle detection screen may be displayed in the display in reaction to stationary objects (guardrails, tunnels, sidewalls, and parked vehicles) on the road or the roadside.
-
A BSM warning indicator light may flash or the warning beep may be activated several times when making a turn at a city intersection.
-
Turn off the BSM while pulling a trailer or while an accessory such as a bicycle carrier is installed to the rear of the vehicle. Otherwise, the radar’s radio waves will be blocked causing the system to not operate normally.
-
In the following cases, it may be difficult to view the illumination/flashing of the BSM warning indicator lights equipped on the door mirrors.
-
Snow or ice is adhering to the door mirrors.
-
The front door glass is fogged or covered in snow, frost or dirt.
-
-
The system switches to the Rear Cross Traffic Alert function when the shift lever (manual transaxle) or the selector lever (automatic transaxle) is shifted to the reverse (R) position.
Refer to Rear Cross Traffic Alert (RCTA) (Search).