Cruising & Traffic Support (CTS)
The CTS is a system which consists of a headway control function and a steering assist function for reducing driver fatigue during traffic jams when driving on expressways or highways.
This system performs headway control to maintain a constant distance between your vehicle and a vehicle ahead at a preset vehicle speed without you having to use the accelerator or brake pedal. Even further, with the steering assist function, when vehicle lane lines are detected, the function assists the driver in keeping the vehicle within the lane lines. If lane lines are not detected, the function provides the driver driving assistance in keeping the vehicle along the motion path with the vehicle ahead.
Do not rely completely on CTS:
-
The CTS is not an automated driving system. In addition, the functions have limitations. Do not rely completely on the system and always stay on course using the steering wheel.
-
Set a vehicle speed within the speed limit according to the road conditions and the weather conditions.
-
The CTS may not be able to detect a vehicle ahead depending on the type of vehicle ahead and its conditions, the weather conditions, and the road conditions. Additionally, the system might be unable to decelerate sufficiently if a vehicle ahead applies the brakes suddenly, another vehicle cuts into the driving lane, or the difference in vehicle speed between your vehicle and the vehicle ahead is larger, which could result in an accident. Check the surrounding conditions and always drive carefully while keeping a safe distance from vehicles ahead and on-coming vehicles.
For the purposes of safety, switch the CTS off when it is not being used.
Leaving the CTS turned on when it is not in use is dangerous as it could operate unexpectedly, resulting in an accident.
Do not use the CTS under the following conditions. Otherwise, it may result in an accident.
-
General roads other than expressways or highways (Driving under these conditions using the CTS is not possible.)
-
Roads with sharp curves and where vehicle traffic is heavy with insufficient space between vehicles, or roads where frequent and repetitive acceleration and deceleration occur (Driving under these conditions using the CTS is not possible).
-
When entering and exiting interchanges, service areas, and parking areas of expressways (If you exit an expressway while headway control is in use, the vehicle ahead will no longer be tracked and your vehicle may accelerate to the set speed).
-
Slippery roads such as icy or snow-covered roads (Tyres could spin causing you to lose vehicle control, or the stop hold control may not operate.)
-
Long, descending slopes (to maintain distance between vehicles, the system automatically and continuously applies the brakes which could result in the loss of brake power.)
-
Two-wheeled vehicles such as motorcycles or bicycles are ahead.
-
(Automatic transmission vehicle)
Slopes with a steep gradient (The vehicle ahead may not be detected correctly, your vehicle may slip while stopped by the stop hold control, or it may accelerate suddenly after it starts moving.)
-
Driving under bad weather conditions (rain, fog, and snow).
-
The vehicle is driven on slippery roads such as icy or snow -covered roads and unpaved roads (Tyres could spin causing you to lose vehicle control, or the stop hold control may not operate.)
-
Tyres of a different specified size are used, such as a temporary spare tyre.
-
Tyres with insufficient tread are used.
-
The tyre pressures are not adjusted to the specified pressure.
-
The vehicle is being used to tow a camper or boat trailer.
-
Tyre chains are used.
-
The vehicle is driven on roads with lane lines other than white (yellow) lines, such as an expressway.
Do not get out of the vehicle while the stop hold control is operating.
(Automatic transmission vehicle)
Getting out of the vehicle while the stop hold control is operating is dangerous as the vehicle may move unexpectedly and result in an accident. Before getting out of the vehicle, switch the CTS off, apply the parking brake, and then shift the selector lever to the P position.


Turn the system off when the vehicle is running on a chassis roller.
Heed the following cautions so that the CTS can operate normally.
-
Turn the system off when the vehicle is running on a chassis roller.
-
Do not modify the vehicle's suspensions.
-
Always use wheels of the specified size for the front and rear wheels. Consult an expert repairer (we recommend an Authorised Mazda Repairer) for tyre replacement.
-
The headway control does not detect the following as physical objects.
-
Vehicles approaching in the opposite direction
-
Pedestrians
-
Stationary objects (stopped vehicles, obstructions)
-
-
If a vehicle ahead is travelling at an extremely low speed, the system may not detect it correctly.
-
If there is a structure on the road or an object (such as a monorail) at a low height off the ground in front of the vehicle, the system may operate. Therefore, do not use the CTS.
-
Do not use the CTS under conditions in which close proximity warnings are frequently activated.
-
If it is necessary to accelerate for a lane change or the vehicle ahead brakes suddenly causing you to close in on the vehicle rapidly, accelerate using the accelerator pedal or decelerate using the brake pedal depending on the conditions.
-
While the CTS is in use, any intended engine braking does not occur even if you shift the shift lever (manual transmission) or the selector lever (automatic transmission). If deceleration is required, lower the vehicle speed setting or depress the brake pedal.
-
While braking by the CTS control is operating, you might hear an operation sound, however, this does not indicate a problem.
-
The brake lights turn on while braking by the CTS control is operating, however, they may not turn on while the vehicle is on a down slope at the set vehicle speed or travelling at a constant speed and following a vehicle ahead.
-
Under the following conditions, the CTS may not be able to detect white (yellow) lines or vehicles ahead correctly and the CTS may not operate normally.
-
The forward sensing camera (FSC) cannot recognise the area in front of the vehicle due to soiling or fog.
-
The white (yellow) lane lines are less visible because of dirt or paint flaking.
-
White (yellow) lane lines or vehicles ahead are less visible because of bad weather (rain, fog, or snow).
-
The vehicle is driven on a temporary lane or section with a closed lane resulting from construction where there might be multiple white (yellow) lane lines, or they are interrupted.
-
The camera picks up an obscure line, such as a temporary line being used for construction, or because of shade, unmelted snow, or grooves filled with water.
-
The road surface is wet and shiny after rain, or there are puddles on the road.
-
Heavy luggage is loaded in the luggage compartment or on the rear seat causing the vehicle to tilt.
-
A vehicle in front of your vehicle is running near a white (yellow) lane line making it less visible.
-
The windscreen is dirty or foggy.
-
The vehicle is driven through an intersection, a junction, or a fork in the road.
-
While white (yellow) lane lines cannot be detected due to road or weather conditions.
-
The surrounding brightness suddenly changes such as when entering or exiting a tunnel.
-
The illumination of the headlights is weakened because of dirt or the optical axis is deviated at night.
-
Back-light is reflected off the road surface or the road surface is wet and shiny after rain.
-
The shade of a guardrail parallel to a white (yellow) lane line is cast on the road.
-
The width of a lane is excessively narrow or wide.
-
The road is excessively uneven.
-
The vehicle is shaken after hitting a road bump.
-
There are various road markings or division lines (lane markings) of various shapes near an intersection.
-
The area in front of the camera is soiled or an object that obstructs the field of view is installed.
-
Exhaust gas from the vehicle in front, sand, snow, and water vapour rising from manholes and grating, and water splashed into the air.
-
The surroundings are dark such as during the early evening or early morning.
-
A vehicle ahead with a certain tail light shape.
-
A vehicle ahead veers off course from your vehicle's line of travel.
-
A vehicle ahead is driving erratically.
-
The vehicle is driven on roads with tight curves.
-
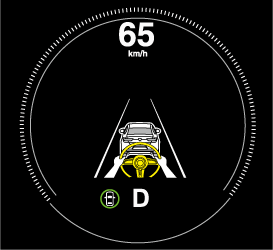
Headway control function
If a vehicle ahead is detected while travelling at a constant speed, the vehicle-ahead indication is displayed and headway control is performed.
Steering assist function
When lane lines are detected, the function assists the driver in keeping the vehicle within the lane lines. If lane lines are not detected, the function provides the driver driving assistance in keeping the vehicle along the motion path with the vehicle ahead.
Steering assist limit warning
If the steering assist function cannot keep the vehicle within the lane lines while the steering assist function is operating, a warning sound is activated and a warning is displayed on the multi-information display to urge the driver to operate the steering wheel.