

 Lea esto primero
Lea esto primero











i-ACTIVSENSE
Sistema de control de luces de carretera (HBC) (Algunos Modelos)
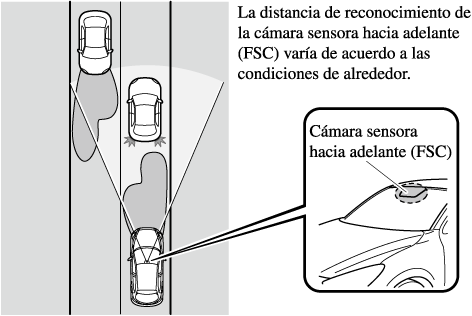
El sistema de control de luces de carretera (HBC) determina las condiciones en la parte delantera del vehículo mientras conduce en la oscuridad usando la cámara sensora hacia adelante (FSC) para cambiar automáticamente los faros entre las luces de carretera y las luces de cruce.
Consulte la sección Luces de advertencia/indicadores (Buscar).
Mientras conduce el vehículo a una velocidad de aproximadamente 30 km/h, los faros cambian a luces de carretera cuando no hay vehículos delante suyo o aproximándose en la dirección opuesta.
El sistema cambia los faros a luces de cruce cuando ocurre una de las siguientes cosas:
-
El sistema detecta un vehículo o los faros/luces de un vehículo que se aproxima en dirección opuesta.
-
Se conduce el vehículo por caminos alumbrados a lo largo por luces o en calles bien iluminadas de ciudades y pueblos.
-
Se conduce el vehículo a menos de aproximadamente 20 km/h.
La advertencia destella cuando el sistema tiene un malfuncionamiento.
Consulte la sección Luces de advertencia (Buscar).
-
No ajuste la altura del vehículo, modifique los faros, o desmonte la cámara, de lo contrario el sistema podría funcionar normalmente.
-
No confíe excesivamente en el sistema de control de luces de carretera (HBC) y conduzca el vehículo prestando atención a la seguridad. Si fuera necesario cambie manualmente los faros entre luces de carretera y luces de cruce.


La sincronización con la que el sistema cambia las luces de los faros en las siguientes condiciones. Si el sistema no cambia las luces de los faros adecuadamente, cambia manualmente entre las luces de carretera y las luces de cruce de acuerdo a la visibilidad, así como las condiciones del camino y el tránsito.
-
Cuando haya fuentes de luz en el área como iluminación pública, carteles iluminados y señales de tránsito.
-
Cuando hayan objetos reflectivos alrededor del área como placas y señales reflectivas.
-
Cuando la visibilidad se reduce durante la lluvia, nieve y niebla.
-
Al conducir en caminos con curvas cerradas u en zonas con ondulaciones.
-
Cuando los faros/luces traseras de los vehículos delante del suyo o en dirección opuesta están atenuados o apagados.
-
Cuando hay suficiente oscuridad como al amanecer o atardecer.
-
Cuando el compartimiento para equipajes está cargado con objetos pesados o los asientos traseros están ocupados.
-
Cuando la visibilidad está reducida debido a que un vehículo delante del suyo tira agua desde su neumáticos a su parabrisas.