

 Lea esto primero
Lea esto primero












i-ACTIVSENSE
Parando el funcionamiento del sistema de soporte de freno de ciudad inteligente [Marcha atrás] (SCBS R)
El sistema de soporte de freno de ciudad inteligente [Marcha atrás] (SCBS R) se puede desactivar temporariamente.
Cuando se desactiva el sistema de soporte de freno de ciudad inteligente [Marcha atrás] (SCBS R), se enciende el indicador de soporte de freno de ciudad inteligente (SCBS) OFF.

Cuando se vuelve a arrancar el vehículo, el sistema se puede usar.
Sin interruptor SCBS OFF
Consulte la sección Características de personalización (Buscar).
Con interruptor SCBS OFF
Oprima el interruptor SCBS OFF para desconectar el sistema. Se encenderá el indicador de soporte de freno de ciudad inteligente (SCBS) OFF en el grupo de instrumentos.
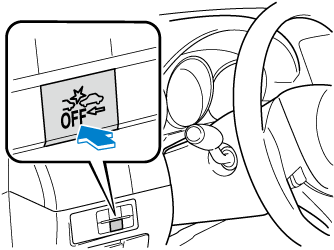
Oprima otra vez el interruptor para volver a encender el sistema. El indicador de soporte de freno de ciudad inteligente (SCBS) OFF se apagará.







