

 Lea esto primero
Lea esto primero












i-ACTIVSENSE
Sistema de reconocimiento de señales de tránsito (TSR) (Algunos Modelos)
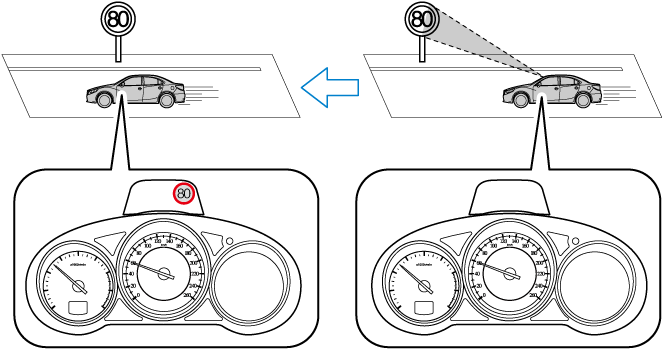
El sistema de reconocimiento de señales de tránsito (TSR) ayudan a prevenir al conductor de descuidar las señales de tránsito, y provee apoyo a la conducción segura exhibiendo las señales de tránsito en la pantalla de conducción activa que son reconocidas por la cámara sensora hacia adelante (FSC) o grabada en el sistema de navegación mientras conduce el vehículo.
Si la velocidad del vehículo excede la señal de límite de velocidad indicada en la exhibición de conducción activa mientras se conduce el vehículo, el sistema notifica al conductor usando la indicación en la exhibición de conducción activa y un sonido de advertencia.
El sistema de reconocimiento de señales de tránsito (TSR) exhibe el límite de velocidad (incluyendo las señales auxiliares) y señales de no entrar.
-
El sistema de reconocimiento de señales de tránsito (TSR) no está disponible en algunos países o regiones. Para más información respecto a los países o regiones, consulte a un técnico experto, le recomendamos un técnico autorizado Mazda.
-
El sistema de reconocimiento de señales de tránsito (TSR) funciona sólo si se inserta la tarjeta SD del sistema de navegación (original Mazda) en la ranura de tarjeta SD. Consulte a un técnico experto, le recomendamos un técnico autorizado Mazda para más detalles.


Siempre verifique visualmente al conducir las señales de tránsito.
El sistema de reconocimiento de señales de tránsito (TSR) ayuda a prevenir al conductor de descuidar las señales de tránsito y provee apoyo a la conducción segura. Dependiendo de las condiciones del tiempo o problemas con las señales de tránsito, una señal de tránsito podría no ser reconocida o se puede exhibir una señal de tránsito diferente de la señal de tránsito actual. Siempre es responsabilidad del conductor verificar las señales de tránsito. De lo contrario, podría resultar en un accidente inesperado.
-
El sistema de reconocimiento de señales de tránsito (TSR) no funciona si hay un malfuncionamiento en la cámara sensora hacia adelante (FSC).
-
En las siguientes condiciones, el sistema de reconocimiento de señales de tránsito (TSR) no funcionará normalmente.
-
Se refleja en el parabrisas un objeto ubicado en el panel de instrumentos y es tomado por la cámara.
-
Se carga equipaje pesado en el compartimiento para equipajes o los asientos traseros y el vehículo está inclinado.
-
Los neumáticos no tienen la presión de aire especificada.
-
Se han equipado neumáticos diferentes de los neumáticos estándar.
-
El vehículo es conducido en una rampa y el área alrededor a o desde un área de descanso o un peaje en una autopista.
-
Cuando el brillo de alrededor cambia súbitamente como al entrar o salir de un túnel
-
La iluminación de los faros es débil debido a la suciedad o a que el eje óptico está desviado.
-
El parabrisas está sucio o empañado.
-
El parabrisas y la cámara están empañados (gotas de agua).
-
Se ilumina con una luz fuerte la parte delantera del vehículo (como una luz trasera o luz de carretera de los vehículos que se acercan).
-
El vehículo está dando una curva cerrada.
-
Luz fuerte se refleja en el camino.
-
Una señal de tránsito está en una posición que la hace difícil de reflejar la luz desde los faros del vehículo, como cuando se conduce el vehículo durante la noche o en un túnel.
-
El vehículo se conduce bajo condiciones de mal tiempo como lluvia, niebla o nieve.
-
Los datos de mapas almacenados para el sistema de navegación no están actualizados.
-
La cámara no puede capturar una imagen de señal de tránsito.
-
Una señal de tránsito está oscurecida por barro o nieve.
-
Una señal de tránsito está tapada por árboles o un vehículo.
-
Una señal de tránsito está parcialmente a la sombra.
-
Una señal de tránsito está doblada o torcida.
-
Una señal de tránsito está demasiado baja o demasiado alta.
-
Una señal de tránsito está demasiado brillante u oscura (incluyendo señales de tránsito electrónicas).
-
Una señal de tránsito es demasiado grande o demasiado pequeña.
-
Se está leyendo un objeto similar a una señal de tránsito (como otra señal de tránsito u otras señales que se parecen).
-
-
El sistema de reconocimiento de señales de tránsito (TSR) no funciona si la exhibición de conducción activa se ajusta a sin exhibición.
-
El sistema de reconocimiento de señales de tránsito (TSR) se puede ajustar para que no funcione.
Consulte la sección Características de personalización (Buscar).







