



Marge d'erreur entre la surface de la route à l'écran et la surface réelle de la route
Il peut y avoir une certaine marge d'erreur entre la surface de la route apparaissant à l'écran et la surface réelle de la route. Une marge d'erreur de la distance perçue risque d'entraîner un accident; il faut donc être bien conscient des conditions suivantes qui sont plus susceptibles de produire des erreurs de perception de la distance.
Le véhicule s'incline en raison du poids des passagers et de la cargaison.
Si le véhicule est incliné, les obstructions détectées par une caméra peuvent apparaître plus loin ou plus près qu’elles ne le sont en réalité.
Caméra avant

-
Obstruction
-
Marge d’erreur
Caméra latérale

-
Obstruction
-
Marge d’erreur
Caméra arrière

-
Obstruction
-
Marge d’erreur
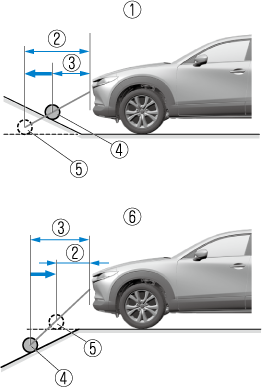
La route monte ou descend de manière abrupte à l'avant ou à l'arrière du véhicule.
Si la route monte ou descend de manière abrupte à l'avant ou à l'arrière du véhicule, les obstructions détectées par la caméra peuvent sembler plus éloignées ou plus proches qu’elles ne le sont réellement.
Caméra avant
-
L'objet apparaît plus loin qu'il ne l'est en réalité
-
distance de l'obstruction visualisée à l'écran
-
distance réelle de l'obstruction par rapport au véhicule
-
Obstruction réelle
-
Obstruction apparaissant à l’écran
-
L'objet apparaît plus proche qu'il ne l'est en réalité
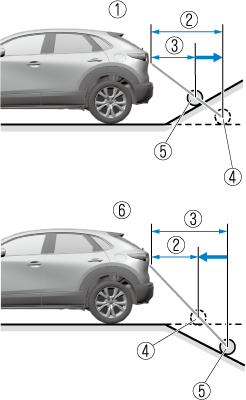
Caméra latérale

-
L'objet apparaît plus loin qu'il ne l'est en réalité
-
distance de l'obstruction visualisée à l'écran
-
distance réelle de l'obstruction par rapport au véhicule
-
Obstruction réelle
-
Obstruction apparaissant à l’écran
-
L'objet apparaît plus proche qu'il ne l'est en réalité
Caméra arrière
-
L'objet apparaît plus loin qu'il ne l'est en réalité
-
distance de l'obstruction visualisée à l'écran
-
distance réelle de l'obstruction par rapport au véhicule
-
Obstruction apparaissant à l’écran
-
Obstruction réelle
-
L'objet apparaît plus proche qu'il ne l'est en réalité
Si le véhicule est en pente, les obstructions détectées par la caméra peuvent apparaître plus loin ou plus près qu’elles ne le sont en réalité.


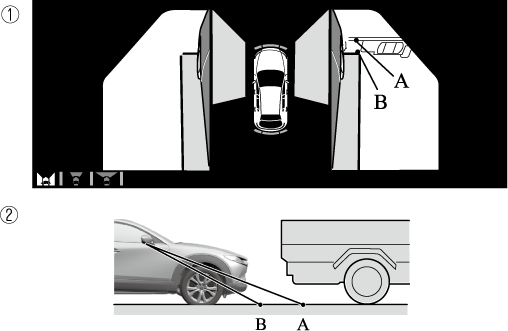
Objet tridimensionnel à l'avant ou à l'arrière du véhicule
Étant donné que les lignes de guidage d’extrémité avant du véhicule ou les lignes de guidage de distance (caméra arrière) sont affichées sur la base d'une surface plane, la distance à l'objet en trois dimensions affichée sur l'écran est différente de la distance réelle.
Caméra latérale
-
(Affichage à l'écran)
-
(Condition réelle)
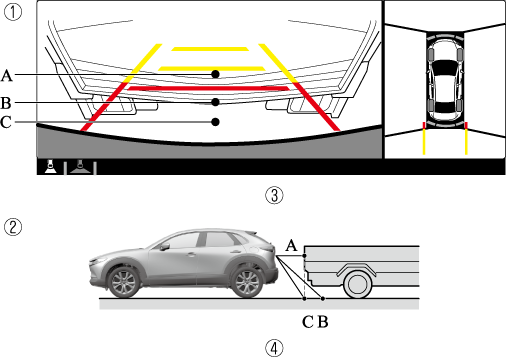
Caméra arrière
-
(Affichage à l'écran)
-
(Condition réelle)
-
Distance détectée sur l'écran A>B>C
-
Distance réelle B>C=A
