



Vue de dessus/Vue avant
Utilisez la vue de dessus/vue avant pour vous aider à vérifier la sécurité de la zone environnante lors du démarrage, du stationnement ou de l'arrêt du véhicule.
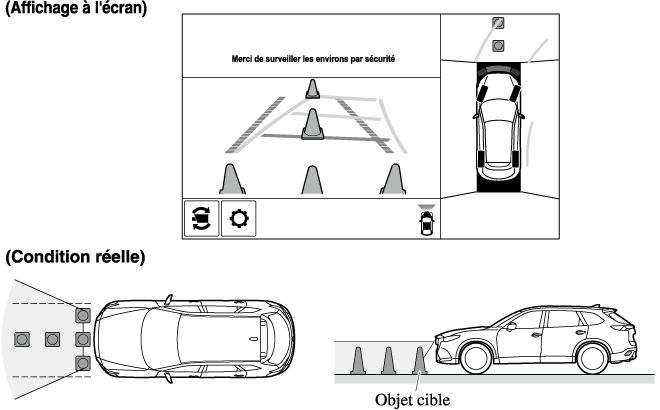
Plage d'affichage
-
Sur l'écran de vue de dessus, les zones en noir à l'avant et à l'arrière de l'image du véhicule et les zones où les images des caméras se rejoignent sont des angles morts.
-
Étant donné que les images affichées sur l'écran de vue de dessus sont traitées à partir de chaque caméra, l'écran de vue de dessus peut s'afficher de la manière suivante.
-
Si une image contenant un objet d’une couleur bien visible est captée par l'une des caméras, l'écran entier peut être affecté et s'afficher dans cette couleur.
-
Les obstructions affichées dans la vue avant peuvent ne pas s'afficher sur l'écran de vue de dessus.
-
Si la position ou l'angle d’une caméra change en raison de l’inclinaison du véhicule, l'image peut sembler déformée.
-
Les lignes sur la route peuvent sembler déformées au niveau des zones où les images des caméras se rejoignent.
-
L'écran entier peut apparaître clair/foncé selon le niveau d'éclairage autour de l’une des caméras.
-


Visualisation de l'écran
|
Affichage/icône |
Contenu |
|
|---|---|---|
 |
Vue des capteurs de stationnement |
Affiche les conditions de détection des capteurs de stationnement lorsque ceux-ci sont activés. Pour plus de détails, se référer à l’avertissement sonore et à l'indication de détection d'obstruction du capteur de stationnement. Se référer à Système de capteurs de stationnement (Rechercher). |
 |
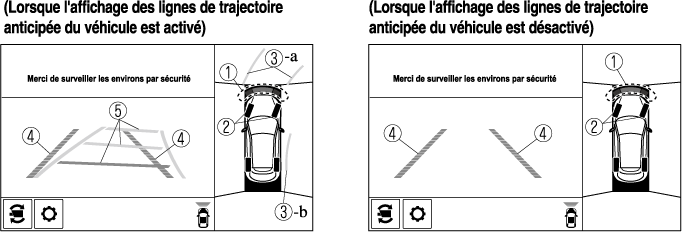
Icônes de pneus |
Indique la direction des pneus. Tournent conjointement avec les mouvements du volant. |
 |
Lignes de trajectoire anticipée du véhicule (orange) |
Indique la trajectoire calculée approximative du véhicule. Tournent conjointement avec les mouvements du volant. a) Indique la trajectoire que devrait suivre l’extrémité du pare-chocs avant. b) Indique la trajectoire que devrait suivre le côté intérieur du véhicule. |
 |
Lignes de largeur étendues du véhicule et lignes de guidage de distance (rouges/bleues) |
Indique approximativement la largeur du véhicule et la distance (à partir de l'extrémité avant du pare-chocs) devant le véhicule.
|
 |
Lignes de guidage de distance sur la trajectoire anticipée du véhicule (rouges/orange) |
Indique la distance (depuis l'extrémité du pare-chocs) à l'avant du véhicule.
|
La portée de détection du capteur de stationnement est limitée. Par exemple, les obstructions se rapprochant sur le côté et les objets de faible hauteur peuvent ne pas être détectés. Toujours vérifier visuellement la sécurité du véhicule lors de la conduite.
Pour plus de détails, se référer à l’avertissement sonore et à l'indication de détection d'obstruction du capteur de stationnement.
Se référer à Système de capteurs de stationnement (Rechercher).
Il est possible de modifier le réglage de manière à masquer les lignes de trajectoire anticipée du véhicule.
Se référer à Fonctions de personnalisation (Rechercher).
Comment utiliser la fonction de lignes de trajectoire anticipée du véhicule
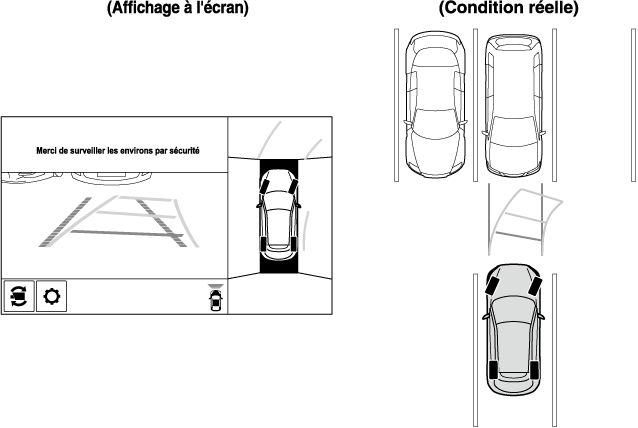
Veiller à ce qu'il n'y ait pas d'obstructions sur les lignes de trajectoire anticipée du véhicule.
Conduire le véhicule vers l'avant en tournant le volant de façon à ce qu'aucune obstruction ne se trouve sur les lignes de trajectoire anticipée.
