

 À lire en premier
À lire en premier












i-ACTIVSENSE
Alerte de circulation transversale à l'arrière (RCTA) (Certains Modèles)
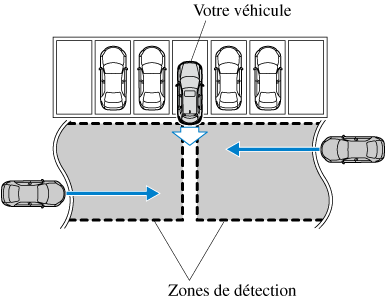
Le système d'alerte de circulation transversale à l'arrière (RCTA) est conçu pour aider le conducteur à vérifier la zone à l'arrière du véhicule des deux côtés tandis que le véhicule fait marche arrière alertant le conducteur de la présence de véhicules approchant l'arrière du véhicule.
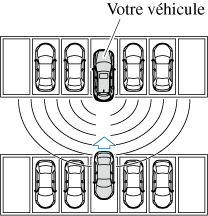
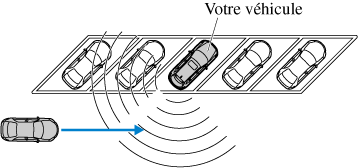
Le système d'alerte de circulation transversale à l'arrière (RCTA) détecte les véhicules qui s'approchent par les côtés gauche et droit du véhicule lorsque le véhicule fait marche arrière à partir d'un espace de stationnement, et avertit le conducteur de danger possible en utilisant les voyants de surveillance des angles morts (BSM) et l'avertisseur sonore.
Fonctionnement de l'alerte de circulation transversale à l'arrière (RCTA)
-
Le système d'alerte de circulation transversale à l'arrière (RCTA) s'enclenche lorsque le levier de changement de vitesses (boîte manuelle) ou le levier sélecteur (boîte automatique) est mis sur la position arrière (R).
-
S'il y a la possibilité d'une collision avec un véhicule qui s'approche, le voyant de surveillance des angles morts (BSM) clignote et l'avertisseur sonore s'activent simultanément.
L'indication d'avertissement du système d'alerte de circulation transversale à l'arrière (RCTA) sur l'écran de rétrovision est aussi synchronisée avec le voyant de surveillance des angles morts (BSM) sur les rétroviseurs de portières.

Toujours vérifier la zone environnante visuellement avant de faire marche arrière avec le véhicule:
Le système n'est conçu que pour vous aider à vérifier s'il y a des véhicules qui sont derrière vous lors d'une marche arrière avec le véhicule. En raison de certaines limitations concernant le fonctionnement de ce système, les voyants de surveillance des angles morts (BSM) peut ne pas clignoter ou pourrait être en retard même si un véhicule se trouve derrière le vôtre. Il s'agit de votre responsabilité en tant que conducteur que de vérifier derrière vous.


-
Dans les cas suivants, le témoin BSM OFF s'allume et le fonctionnement du système s'arrête. Si le témoin BSM OFF reste allumé, il faut faire inspecter le véhicule par un concessionnaire agréé Mazda dès que possible.
-
Un certain problème avec le système notamment avec les voyants de surveillance des angles morts (BSM) s'est produit.
-
Un trop grand écart de position lors du montage d'un capteur radar (arrière) sur le véhicule a été effectué.
-
Il y a une grande accumulation de neige ou de glace sur le pare-chocs arrière à proximité d'un capteur radar (arrière).
-
La conduite sur des routes enneigées pendant de longues périodes.
-
La température à proximité des capteurs radar devient très chaude du fait de rouler durant de longues montées pendant l'été.
-
La tension de la batterie a diminué.
-
-
Dans les conditions suivantes, les capteurs radar (arrière) peuvent ne pas détecter des objets cibles ou il peut être difficile de les détecter.
-
La vitesse du véhicule en marche arrière est d'au moins 15 km/h ou plus.
-
La zone de détection du capteur radar (arrière) est obstruée par un mur voisin ou un véhicule en stationnement. (Faire marche arrière avec le véhicule jusqu'à une position où la zone de détection du capteur radar n'est plus obstruée.)

-
Un véhicule s'approche directement à partir de l'arrière de votre véhicule.
-
Le véhicule est stationné sur une pente.
-
Tout de suite après que le système de surveillance des angles morts (BSM) devienne opérationnel.
-
-
Dans les cas suivants, il peut s'avérer difficile de voir l'éclairage/le clignotement des voyants de surveillance des angles morts (BSM) installés sur les rétroviseurs extérieurs.
-
La neige ou la glace adhère aux rétroviseurs extérieurs.
-
La vitre de la portière avant est embuée ou couverte de neige, de gel ou de saleté.
-
-
Désactiver le système de l'alerte de circulation transversale à l'arrière (RCTA) tandis que vous tirez une remorque ou un accessoire comme un porte-vélos installé à l'arrière du véhicule. Sinon, les ondes radio du radar seront bloquées ce qui entraînera un mauvais fonctionnement du système.







